雲南省天文台の月レーザー測距研究・実験
雲南省天文台の月レーザー測距研究・実験 | 中国レーザー -- 中国光学ジャーナルネットワーク (opticsjournal.net)
から引用した
 ダウンロード: 1536 回
ダウンロード: 1536 回
1 はじめに
地球-月測定の最も正確な手段として、月レーザー測距(LLR)は50年近く前から存在しており、その原理は、地上局と月レーザー後方反射器(アポロ15号、アポロ14号、アポロ11号、ルナホート1号、ルナホート2号)の間のレーザーパルスの飛行時間を光速と組み合わせて正確に測定することによって距離を計算することです。[1]。 地上局と月レーザー後方反射器の間の距離とその変化には、天体地球力学、地球月科学、月物理学、重力理論などの多くの科学的研究にとって非常に価値のある非常に豊富な情報が含まれています。[2-3. ]月の形状、サイズ、表面の特徴、内部構造の決定など[2.4 ]、重力理論と一般相対性理論の効果のテスト、等価原理の検証、重力定数の変化、太陽と月のシステムの潮汐など[2.5 ]。
LLRは単一光子検出技術のピークを表しており、50年近くの従来の観測操作と技術開発の後、LLRは依然として技術的難易度の高い複雑な作業です。 現在、人工衛星レーザー測距を実行できるステーションは世界に50近くあり、高精度の衛星レーザー測距データが広く使用されています。[6-7. ]ただし、従来のLLR作業を実行できるのは、アメリカのMLRS(マクドナルドレーザー測距ステーション、0.76 m望遠鏡)とアポロ(3.5 m望遠鏡)だけです。[8-9. ]、フランスのグラース[10](1.5 m望遠鏡)とイタリアのMLRO(マトラレーザー観測天文台、1.5 m望遠鏡)を含む4つの天文台。 レーザー測距望遠鏡の口径やレーザーなどの多くの要因の制限により、中国では初期段階でLLR実験を実施するステーションが少なくなっています。 20世紀の終わりには、中国科学院雲南天文台の1.2m望遠鏡は、当時中国で最大の望遠鏡であり、最も潜在的なレーザー月望遠鏡の<>つでした。[1]昆明測距ステーションは、20世紀の80年代後半からLLRの研究に取り組んできました[11-12. ]。 近年、他の国内局もLLR技術研究を実施し始めています。 地球と月の距離は約384000kmですが、従来の衛星レーザー測距に対応する衛星は、低軌道から静止軌道へのLLRに近いです。 衛星レーザー測距とLLRでは、エコー光子の数は距離の4乗に反比例します。 同じ条件下で、LLR中のエコー光子の数は静止軌道衛星のレーザー測距の1/10000未満であるため、LLRは従来の衛星レーザー測距よりもはるかに困難です。 放出されたレーザーエネルギーをより集中させるためには、LLRを行う際にレーザー発散角をできるだけ小さくする必要があり、望遠鏡の追跡と指向精度に対するより高い要件が提唱されます。
長年の継続的な研究と探査の後、LLRの多くの技術的問題を克服した後、中国科学院の雲南天文台は1.2m望遠鏡10Hz共通光路レーザー月面測定システムを設立し、2018年1月22日にアポロ15号の月面反射器のエコーを検出することに成功し、中国でのLLRの実現を主導しました。 1.2m望遠鏡レーザー月系と実験結果を紹介し、詳細に分析しました。 望遠鏡の追跡精度とポインティング精度の向上に基づいて、月のエコー信号認識が深く研究され、中国の今後の嫦娥<>号リレースターレーザー測距の基礎が築かれました。
2 雲南省天文台LLRシステム
LLRは、地上天文台から月レーザ反射器までのレーザパルスの往復時間
ここで、
従来の衛星レーザー測距と比較して、LLRは非常に遠く、エコー光子の数はまれであり、LIDAR測距式によれば、エコー光子の数はサブ単一光子オーダーにさえ達します[11]。
2.1 光学系
2.1.1 望遠鏡
雲南天文台の1.2m望遠鏡は地上フレームを採用し、高さシャフトはトルクモーターによって直接駆動され、方位軸はダブルトルクモーター摩擦伝達によって駆動されます。 望遠鏡の主なパラメータを
2.1.2 レーザー発光光路
レーザー発光型光ルーティングレーザー、回転ミラー、ミラーM3~M8、ビームエキスパンダとビームスプリッタ(
レーザーは発光光路の重要な機器の10つであり、この研究では北京レイバオオプトエレクトロニクステクノロジー株式会社が製造したSGR-Extra-2キセノンランプポンプレーザーを使用し、そのパラメータを
2.1.3 エコー受信光路
エコーが望遠鏡に入った後、それはミラーによって、ミラー、ミラー、集束レンズ、ビームスプリッターおよび検出器からなる

テーブル 1 望遠鏡の主なパラメータ
表 1. 望遠鏡の主なパラメータ

テーブル 2 レーザーの主なパラメータ
表 2. レーザーの主なパラメータ
|
コリメーションフィルタの光路は、

CMOSカメラは、望遠鏡のポインティングモデルを確立し、LLRで月面を画像化して望遠鏡のポインティングを確認するためのターゲット監視光路端末受信装置として使用され、そのスペクトル応答を

テーブル 3 CMOSカメラの主なパラメータ
表 3. CMOSカメラの主なパラメータ
テーブル 4 プローブの主なパラメータ
表 4. 検出器の主なパラメータ
|
2.2 測距制御とデータ収集
2.2.1 測距制御

10Hz測距制御システムの回路タイミングを図6に示します。 回転ミラーは10Hzの同期信号を生成し、各同期信号の立ち上がりエッジ制御コンピューターを使用してレーザー放射コマンド信号を生成し、レーザーはコマンド信号を受信した後にレーザーを放射します。 PINメイン波検出器は、放出された各レーザー信号を検出し、メイン波パルスを出力します。 主波信号を受信すると、制御コンピュータは観測対象の軌道距離情報に従ってエコー到着時間を計算し、その結果を距離ゲート発生器に送信し、エコーがほぼ到達するとゲート信号をHQE-SPADに送信します。

2.2.2 データ収集
月面実験では、A033-ETイベントタイマ[分解能1ps未満、精度5ps未満、デッドタイム50ns]をデータ取得に使用しました。

3 LLR実験とデータ解析
3.1 観測実験
1.2m望遠鏡の10Hz共通光路LLRシステムの開発後、2017年11月中旬にレーザー月面測定実験を開始し、2018年1月22日夕方にアポロ15号角度反射鏡のエコーデータを1周期で測定することに成功しました。 それ以来、23月3日にアポロ15号1セット、アポロ14号2号11グループ、アポロ1号24グループが測定されました。 アポロ1号とアポロ15号のデータは1月14日に測定されました。 1月26日、アポロ3号の15つのグループ、アポロ2号の14つのグループ、アポロ1号の11つのグループのデータが測定されました。 図8は、2018年1月23日に測定されたアポロ15号の残差データを示しており、横軸はレーザー放射の瞬間(ワールドタイムコード、UTC)、縦軸は測定距離と予測距離の間の偏差(残差)です。 実験中、アポロ35号データ26セット、アポロ15号データ3セット、アポロ11号データ6セットの合計14セットのデータの測定に成功し、測距実験結果の統計を表5に示します。

テーブル 5 LLR実験観測統計
表 5. LLRの実験的観察からのデータ統計
|
3.2 データ分析
レーザー月面測定実験によって得られたデータの信号識別と前処理分析は、データの精度、エコーレート、および信号対雑音比を取得し、標準点データを形成し、その妥当性を検証することができます。
3.2.1 信号の識別
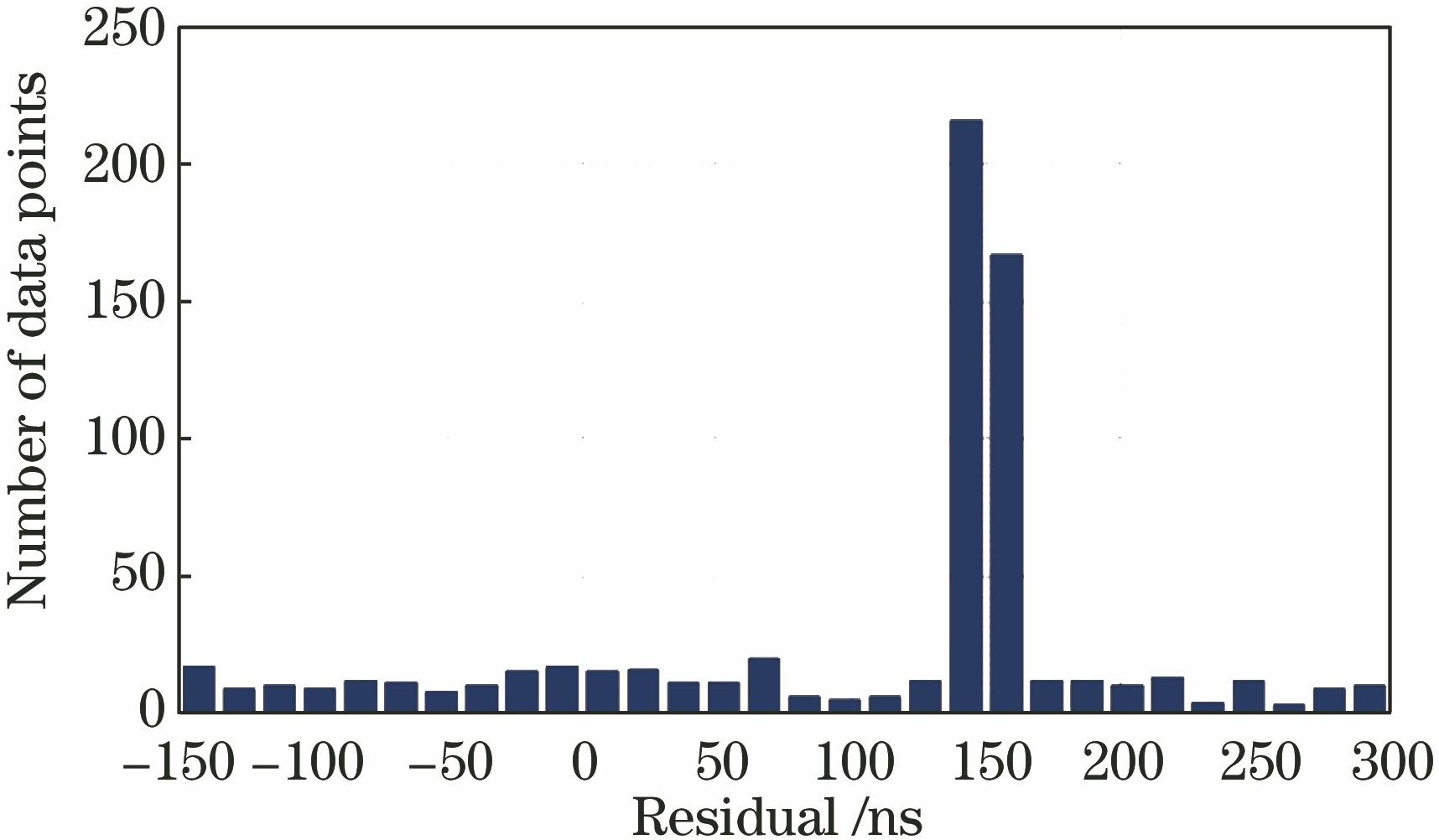
距離ゲート内の範囲残差データの分布がメッシュされ、各グリッド内のデータ ポイントの数がヒストグラムでカウントされます。 グリッドの幅(残差方向)は10ns(または15ns)で、長さは観測データセグメント全体の時間範囲であり、ヒストグラム統計チャートになり、データポイント数が最も多いグリッドに信号が表示される場合があります。 図

ヒストグラム結果のポアソン確率分析[13]、すべてのグリッドのデータポイントの数が平均化され、平均
グリッドのデータ点数が確率 P である場合は、適切なしきい値

3.2.2 データ処理
信号データを特定した後、低次多項式フィッティングにより精度を満たすデータ内の点を計算し、データの信号対雑音比とエコーレートを統計的に分析します。
毎月の測定データは、20秒以内の時間、つまり20秒以内の信号エコーポイントの数、対応する期間のノイズポイントとレーザーパルスの数でカウントされます。 この20秒以内の信号対雑音比(SNR)とエコーレートは、それぞれ次のように表すことができます。
ここで、


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
時間ベースの統計では、データ全体の合計信号対雑音比と合計エコーレートは、式(3)と式(4)によって計算されます。
3.2.3 データ検証
国際レーザー測距ネットワークによって提供される標準点アルゴリズムに従って、測定データは標準点に生成されます。 標準ポイントデータには、主に日付、時刻、レーザー飛行時間、リフレクター番号、ステーション番号、エコーポイントの数、データ信号対雑音比、気象パラメータ、レーザー波長などの情報が含まれます。 測定データが標準点として生成された後、パリ天文台月面分析センターが開発した月レーザー測距サービスにアップロードされます。[14]ウェブサイトでの検証。 2018年1月23日13:15(UTC)に観測されたアポロ0号のデータの検証結果によると、この測定データの距離偏差は196.35mです。 実験中に合計0の標準点データが得られ、すべての標準点データが検証され、その結果、測定偏差の標準偏差はそれぞれ752.11 m(アポロ0号)、375.14 m(アポロ0号)、329.15 m(アポロ11号)でした。 雲南省天文台のアポロ14号、アポロ15号、アポロ<>号の反射器アレイのLLRシステムの測距精度は、メートルの測距精度よりも優れていることがわかります。
4 まとめ
月探査活動の継続的な加熱に伴い、月の探査は再び天文観測の分野における研究ホットスポットの1つになりました。 LLRデータの蓄積と解析を通じて、天文地球力学、地球月科学、月物理学、重力理論の研究は重要な科学的研究活動です。 長年の理論研究と技術研究の後、雲南天文台は、中国の今後のChang'e-2リレースターレーザー測距技術の良い基盤を築いた中山大学の「天琴プログラム」の推進の下で、LLRの分野で大きな進歩を遂げました。 本研究では、雲南省天文台<>.<>m望遠鏡の共通光路LLRシステムとその初期観測実験データ処理手法を導入し、妥当性検証を行った。 現在、レーザーのパルス幅の影響を受け、測定精度はメートルレベルまでです。 次のステップでは、狭いパルス幅のレーザーを使用してLLR実験を行い、LLRの精度をセンチメートルレベルまで向上させるよう努めます。
[1]イェシュフア、 黄ジュエ。 天文地球力学[M]。 済 南: 山東科学技術プレス、 2000: 154- 157.
イェ・シー、 黄C. 天体地球力学[M]。 済 南: 山東科学技術プレス、 2000: 154- 157.
[3] ゼルホウニW、キャピテーヌN、フランコウG.天極座標の推定に対するLLRデータの貢献[J] . 第16回レーザー測距国際ワークショップ論文集, 2008: 302-304.
[4] ミュラーJ、ビスクペックL、ホフマンF.LLRデータから決定された地球方位と相対性理論のパラメータ[J]。 第19回レーザー測距国際ワークショップ論文集, 2014, 3033.
張 Z P, チェン Z E, 張 H F, 他 北斗衛星の全球レーザー測距観測とデータ応用[J]. レーザーの中国ジャーナル, 2017, 44(4): 0404004.
劉 桐, 陳 浩, シェン・ミン, 他 回転衛星のレーザ測距データの解析と処理 中国レーザージャーナル, 7, 2017(44): 5.
劉 T, 陳 H, シェン M, 他 スピニング衛星レーザー測距データ解析と処理[J]。 レーザーの中国ジャーナル、2017、44(5):0504001。
[8] Murphy T W, Adelberger E G. Battat J B R, et al. アパッチポイント天文台の月レーザー測距操作:機器の説明と最初の検出[J]。 太平洋天文学会の出版物, 2008, 120(863): 20-37.
[10] ヴェイレットC, マンギンJF、 チャボービー・ジェら ルビー期(1981-1986)のCERGAでの月レーザー測距[M]。 ワシントンDC:アメリカ地球物理学連合、 1993: 189- 193.
[11]シオン・ヤオヘン。 月面レーザー測距の新技術と方法に関する研究[D]。 昆明:雲南天文台、中国科学院、 2001.
シオンYH。 月面レーザー測距のための新しい技術的手法に関する研究[D]。 昆明:雲南天文台、中国科学院、 2001.
[12]郭瑞、雄耀恒。 補償光学技術のレーザー月面測定における大気波面傾斜の検出と計算への応用[J]。 中国天文学ジャーナル, 2004, 45(4): 413-421.
Guo R, Xiong Y H. 補償光学技術を用いた場合の月レーザー測距における大気先端傾斜の検出と計算[J]. アクタアストロノミカシニカ、2004、45(4):413-421。
[13] アボットRI、シェルスP J、マルホランドJ D、他 月のレーザー観測:1969-1971年の法線点の特定と構築[J]。 天文学ジャーナル、1973、78:784。
[14]バラチェC、 ブキヨン、 カールッチTら 月面レーザー測距観測のためのウェブインターフェース[C]。 Systèmes de Référence Spatio-Temporels2010, 2011: 81- 82.