ライター:syozan_fhfhfkさん(最終更新日時:2016/3/13)投稿日:2012/7/1
.

アポロ月面写真の疑惑 地平線

■テーマ
疑わしいアポロの月面写真について、
前にも書きましたが、より論理的に解析してみました。
あまりにもいいかげんなことが言われています。
結果は「おかしい」ということです。つまり捏造写真である可能性もある、
ということです(^^
地平線の問題について結論を出しました。
光源の位置については、この後にします。
■オープニングトーク
この問題に関して質問をしたところ、多くのデータを引用して、私の間違いを指摘してくださる方が多くいました。それに対して、さらなる質問で、答え、さらなる質問をしようと思ったのですが、1000文字ではとても書ききれず、このチエノートをもって、まとめと過去の反論への意見としました。
また、
bluegrassandbluesさんへ
作図の上で使った36°に関して、
> 36度の角度も無意味です
ですが、
http://detail.chiebukuro.yahoo.co.jp/qa/question_detail/q1389491768
の回答で、bukuroxさんが出された値なんですよ! よく読んでくださいね。
お仲間に対して失礼ですよ!
それとにかく、もっと落ち着いて、いろいろなことに目をおくばりください。
欲求不満が多すぎ、それをこんなところで解消しないでくださいね! 心理カウンセラーより・・・
あなたは、精神的に問題があります。他人を、いともも簡単に「ばか」と
言うことにも現れています。きおつけたほうがいいと・・・殺されますよ!
■本論
【基本的考察】

(1) 月面が平面であるときの地平線(図1)
地平線を見る角度θは月面に平行であり、視点の高さaによらな
い。
(2) 物体と地平線と視点の高さ(図2)
高さhの物体が視点と地平線の間にある場合、物体から地平線までの
距離を、地平線が高いい場合を正としてbとすれば、
視点の高さa=h+b
となる。つまり、物体がと遠くにあっても、そのhがわかっていれば、
bも推測できるので、視点の高さaがわかる。
着陸船の高さは6.37mである。 写真から推測すると、地平線
は着陸船より2mほど高く、視点は8mくらいあることがわかる。
月面が球であることを考えれば、視点はさらに高くなる。10mくら
いか? いったいどこから撮っているのだろうか?
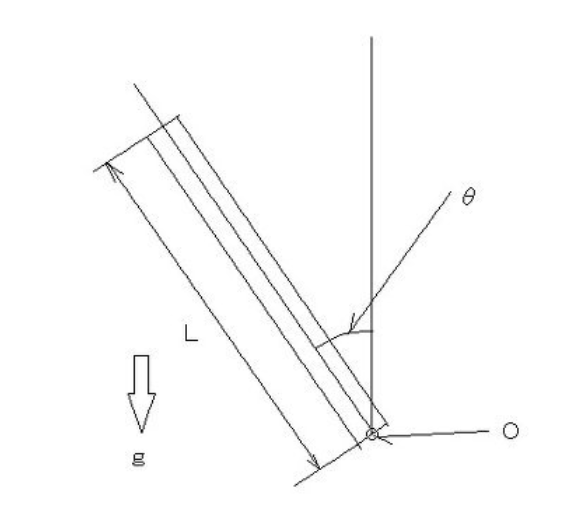
(3) 月面が球面であるときの地平線(図3)
球面では複雑になるので、円筒面であるときを考える。
θ=arccos(1/(1+a/r))
月の半径rは3474/2kmであるので、視点高さa=10mと
すると、
θ≒0.19°
地平線位置までの距離c=(r+a)*sin(θ)≒4200m
図3から視点高さaが10mのとき、約4200m先、視点位置での
接平面から約4m下の地点が、地平線となることがわかる。上述の
ように、視点からここを見込む角度は、水平から下に約0.19°で
ある。
別な言い方をすれば、平面において約3000m先が月面で見える地平線に相当する。10/sin(0.19°)≒3000
つまり、月面でも、地平線は無限平面と仮定しても問題ないと言
える。
視点がさらに低ければ、さらにこの球面の効果は無視できる。
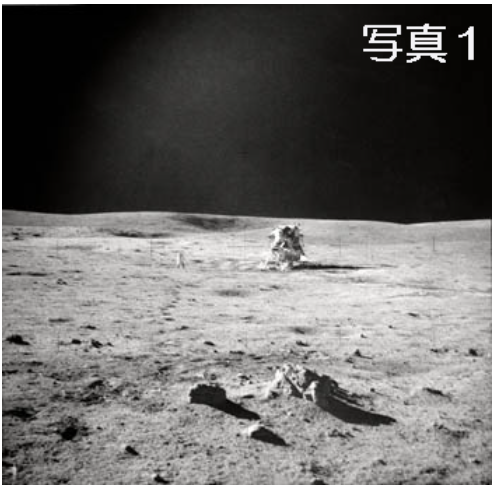
【写真の考察】
捏造説を検証する動画
https://www.youtube.com/watch?v=n6yf0b5JrSo
の4分後、に写真1の話題が出てくる。そこで、影の方向がいろいろ
あることの理由として、「光源が2つある」とされているが、これは
おかしい。2つあれば、影は1つの物体で2つ現れるはずであり、ま
ったく素人的発想である。単に
「光源が物体に近い」
という可能性があるだ
けである。この番組では、手前の石ころのある部分が斜面になって
いるということで再現して見せている。確かに、地平線に平行に近
い影でも手前に落ち込んだ斜面に落ちれば、写真1のように、まる
で手前に伸びているかのような映像になる。月面の状態が不明で
あるので、この写真についてはわからないと言える。
もう一度写真1,2を出します。


地平線は、もっと上にあるべきたと思える。上の動画のセットに大変
似ている。無限に続く平面なら、もっと画面上で上に地平線はあるので
はないか?
★それにしても、写真1は、地平線というか、遠方に現実味
がない。そこでスパッと切られているセットみたいである。遠方らしき
ものがない。如何かな? 皆さんは・・・
【youtube動画】
捏造説に反論する動画
https://www.youtube.com/watch?v=n6yf0b5JrSo
についてである。
写真2は、この動画で写真1に似せて撮った模型写真である。スタジオの
月面である。当然、無限ではないので、セットの両端が平行であると仮定して
延長して、本当の地平線を書いてみた。球面でも、上述のように3000m先であるから、このセットの端よりはるかに先である。
この写真2は、写真1に似ている。写真1の地平線も、このようにもっと上に
あるのでは?
この写真2こそが、写真1に疑いがないことではなく、スタジオ撮影であることを立証してしまっているのではないですか?
それにしても写真1の地平線が正しくても、カメラ位置は月上8mくらい上であることがわかる。いったいどこから撮ったのか? なぜ、こんなたかいところから撮らねばならなかったのか? つまり、模型ではないか? である。
アドバイス
>ここが気になった
>gounounou987さん
>なぜ普通に「撮影者が丘の上にいる」とか「地平線側が丘になっている」じゃ駄目なの? 月面にも普通に丘や谷があると思うんだけど。
そんなことより、あの写真を見たとき、直観的に「模型だな」と思わなければいけない。わかるものならわかる。これがわかる者が少ない。
>ここが気になった
>gounounou987さん
>いや、地平線に対して疑問だ、って知恵ノートなのに、
>それに対するツッコミに「そんなこと」よばわりじゃ この知恵ノート意味無く無い?
>きちんと反論求む。
よっしゃ!簡単。あなたがそうなっているってことを、科学的に証明してください。あなたの反論を、そのまま、あなたに・・・
どうかな?
地平線が丘である、撮影点が8mの丘にあった、ということをと証明してください。お願いします。
>ここが気になった
>gounounou987さん
>議論としておかしいだろ。 月が無限平面、って前提ならともかく、
>凸凹してるんだから、 まずは「坂の上からは撮影不可能」を証明してくれないと
>話にならない。 その後でつっこんであげるから
8mも凸凹してるかななぁー? 苦しいねぇー。
あまりにも月並みで、つまらない反論に喜びを感じる。
こんな程度なのかなー、てね(^^
もっとおもしろくて高度な反論ないのかなー(**
証明はできないのよ。それはわかるよね。推測するしかない。どんなことでも、肝心なものは直観的に把握することなんだ。優れた者は、優れた行為を論理的にはやらない。画期的なことが論理的になされたことはないのだよ。
証明できないといけないなら、あなたが証明してごらん?
直観的にこ写真はおかしい。それが分かるものにはわかるのだよ。
はっははっははーーーー




















{kind=link}